ソフトロボティクス
ソフトロボティクスはパワーと緻密さを追い求めてきた今までのロボット工学とは大きく異なり,あいまいさといいかげんさを受け入れた領域です.これによって,日常生活で人間にやさしく接する,あるいは環境に適応して動作するロボットを目指します.
|
|
|
|
バルーン型ジャコメッティアーム
災害現場の初期観察,建造物の点検等に用いるための,非常に軽くて安全な20 mの長尺ロボットアームを開発しました.
ヘリウムを充填したフィルム風船の構造材で自重補償を行い,アームの関節は細径人工筋肉で動かします.
|
|
|
ジャコメッティ歩行ロボット
細径人工筋によって駆動される歩行ロボットです.非常に軽量で,もち運びが容易で階段から落下しても周囲やロボット自身のダメージがほとんどない,といった可搬性や安全性をもっています.
|
|
|
動く布
細径人工筋肉を布状に編みこむことで,「動く布」が出来上がります.
|
|
|
身体にフィットするソフトメカニズム
細径人工筋を使うことで,体に心地よくフィットするソフトメカニズムが作れます.映画「バック・トゥ・ザ・フューチャー2」で描かれた,靴ひも調整を自動で行う未来のスニーカーの実現です.
|
|
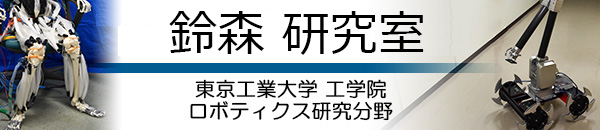
織布化、パワーサポートスーツへの応用
細径人工筋を織ることで,軽く,柔らかく,着心地のよいパワーサポートスーツの実現を目指しています.現在,織布化と簡単なスーツの試作を進めています.
|
|
ソフトロボット
これまでに開発した種々のソフトロボットです.動画はこちらから.
|
Science of Soft Robot PV
|
|
|
|
新学術領域「ソフトロボット学」のプロモーションビデオです.
|