youtube download
Movie.1 ダイジェスト
youtube download
Movie.2 登坂
youtube download
Movie.3 移動方法切り替え
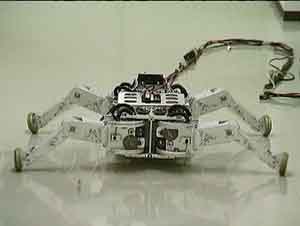
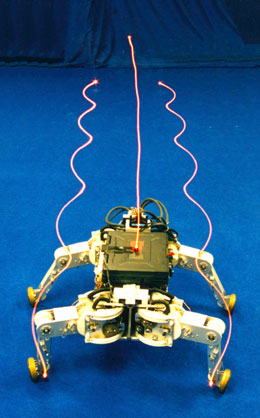
(1994年~)現在、不整地で高い踏破性を発揮する脚型移動ロボットと、硬平地で高速な移動を実現する車輪型ロボットの両方の特質を兼ね備えた脚―車輪ハイブリッド型移動体が注目されている。これまで試作された車体のほとんどは、歩行機械の足先あるいは胴体に能動車輪を付加したものであった。この車輪には、駆動系と操舵系のアクチュエータが付加されるため、かなり重量がかさんでいた。その結果、歩行モードにおいては脚を軽快に振ることができず、歩行機械としての特性は限定されていた。
Photo.1 Wheeled locomotion and trajectory
Photo.2a Walking mode
Photo.2b Skating mode
Fig.1 Leg trajectory refered from the body coordinate
Photo.3 Figure 8 propulsion
Photo.4 Rotational motion
References:
広瀬 茂男, 竹内 裕喜; ローラウォーカ:新しい脚-車輪ハイブリッド移動体の提案, 日本機械学会誌(C編), 62, 599, pp.242-248 (1996)
Shigeo HIROSE, Hiroki TAKEUCHI; Roller-Walker: A Proposal of New Leg-Wheel Hybrid Mobile Robot, Proc. Int. Conf. on Advanced Robotics, pp.917-922 (1995)
Gen Endo, Shigeo Hirose; Study on Roller-Walker ( Multi-mode Steering Control and Self-contained Locomotion ), Proc. Int. Conf. on Robotics and Automation, pp. 2808-2814 (2000) [PDF]
遠藤玄,広瀬茂男; ローラーウォーカーに関する研究 -システムの構成と基本的動作実験-,日本ロボット学会誌,Vol.18, No.2, pp.270-277 (2000) [PDF]
遠藤玄,広瀬茂男; ローラーウォーカーに関する研究 -基本的運動の生成と自立推進実験-, 日本ロボット学会誌,Vol.18, No.8, pp.1159-1165 (2000) [PDF]
遠藤玄,広瀬茂男; ローラーウォーカーに関する研究-脚軌道による推進特性の適応的調節-,日本ロボット学会誌,Vol.26,No.6,pp.691-698 (2008) [PDF]
Gen Endo, Shigeo Hirose; Study on Roller-Walker - Improvement of Locomotive Efficiency of Quadruped Robots by Passive Wheels, Advanced Robotics, Vol. 26, Issue 8-9, pp. 969-988 (2012) [PDF]